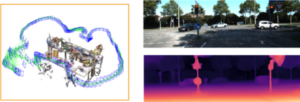
28 mayo 202414 junio 2023 por i3a SLAM lab: This team works on Simultaneous Localization and Mapping, Odometry and Depth estimation InvestigadoresJosé Mª Martínez MontielJosé Ángel Castellanos GómezSeong Hun LeeJuan Domingo Tardós SolanoRaúl Iranzo CubelJosé Neira ParraRichard Elvira López-EchazarretaErnesto Lozano CalvoSergio Izquierdo BarrancoVíctor Martínez BatlleXavier Anadón García-ArquimbauDavid Recasens LafuenteJavier Morlana LedesmaEduardo Fraguas BordonabaSamuel Adrián CerezoJavier Civera SanchoTomás Berriel MartinsJavier Tirado GarínJavier Rodríguez Puigvert ProyectosEndoMapperGPL-SLAMURGE_4_VSLAMActive SLAM