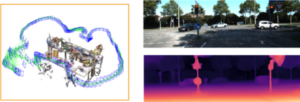
28 mayo 202414 junio 2023 por i3a SLAM lab: This team works on Simultaneous Localization and Mapping, Odometry and Depth estimation InvestigadoresJavier Tirado GarínRaúl Iranzo CubelJosé Ángel Castellanos GómezJavier Rodríguez PuigvertJosé Neira ParraVíctor Martínez BatlleJosé Mª Martínez MontielSergio Izquierdo BarrancoEduardo Fraguas BordonabaDavid Recasens LafuenteErnesto Lozano CalvoJavier Morlana LedesmaSamuel Adrián CerezoTomás Berriel MartinsJavier Civera SanchoXavier Anadón García-ArquimbauJuan Domingo Tardós SolanoSeong Hun LeeRichard Elvira López-Echazarreta ProyectosEndoMapperGPL-SLAMURGE_4_VSLAMActive SLAM